 Robotic Manipulation using Continuous Deep RL • Developed DRL pipeline to train a 7-DOF robotic arm agent in the PandaReach-v3 environment using the panda-gym toolkit.
• Implemented SAC, NAF, and TD3 and integrated Hindsight Experience Replay to address sparse reward challenges.
• Evaluated the DRL models over 3 random seeds, achieving a reward of ~-1.768.
Robotic Manipulation using Continuous Deep RL • Developed DRL pipeline to train a 7-DOF robotic arm agent in the PandaReach-v3 environment using the panda-gym toolkit.
• Implemented SAC, NAF, and TD3 and integrated Hindsight Experience Replay to address sparse reward challenges.
• Evaluated the DRL models over 3 random seeds, achieving a reward of ~-1.768.  PondFishDet • Developed CLAHE-YOLOv8 and MSR-YOLOv8 algorithm to enhance underwater image analysis for accurate fish detection.
• Trained on real-time underwater images, accounting for variable lighting conditions.
• Ranked Top 6 in the DePondFi '23 Challenge, NCVPRIPG-2023.
PondFishDet • Developed CLAHE-YOLOv8 and MSR-YOLOv8 algorithm to enhance underwater image analysis for accurate fish detection.
• Trained on real-time underwater images, accounting for variable lighting conditions.
• Ranked Top 6 in the DePondFi '23 Challenge, NCVPRIPG-2023.  Street Litter Detection • Developed a street litter detector using Yolo-v5 model based on Euclidean approach.
• Trained on Pennfudan and TACO Dataset. Achieved a commendable F1 score of 89%.
• Successfully deployed the model on real-time CCTVs for efficient litter detection.
Street Litter Detection • Developed a street litter detector using Yolo-v5 model based on Euclidean approach.
• Trained on Pennfudan and TACO Dataset. Achieved a commendable F1 score of 89%.
• Successfully deployed the model on real-time CCTVs for efficient litter detection.  LQR controlled Self Balancing Bike • Developed and implemented a specialized Linear Quadratic Regulator (LQR) controller for a single reaction wheel-based self-balancing robot.
• Verified and assessed the algorithm's performance through simulations in V-rep software.
• successfully constructed a self-balancing bike emphasizing autonomous item delivery capabilities.
LQR controlled Self Balancing Bike • Developed and implemented a specialized Linear Quadratic Regulator (LQR) controller for a single reaction wheel-based self-balancing robot.
• Verified and assessed the algorithm's performance through simulations in V-rep software.
• successfully constructed a self-balancing bike emphasizing autonomous item delivery capabilities.  Design and Fabrication of Miniaturized Aircraft • Fabricated a rubber band powered aircraft using lightweight Balsa wood and paper structures.
• Designed wing geometry with a dihedral angle of 20° for improved flight stability.
• Achieved a sustained flight time of 2 minutes 10 seconds during testing.
Design and Fabrication of Miniaturized Aircraft • Fabricated a rubber band powered aircraft using lightweight Balsa wood and paper structures.
• Designed wing geometry with a dihedral angle of 20° for improved flight stability.
• Achieved a sustained flight time of 2 minutes 10 seconds during testing.  AI-assisted Waste Recycling System • Smart India Hackathon 2022 award-winning project.
• Developed three deep learning models: (1) detection of waste on roads, (2) classification into seven recycling categories, and (3) classification of plastic waste into five sub-categories based on shape.
• Implementation currently in progress in collaboration with ICCE.
AI-assisted Waste Recycling System • Smart India Hackathon 2022 award-winning project.
• Developed three deep learning models: (1) detection of waste on roads, (2) classification into seven recycling categories, and (3) classification of plastic waste into five sub-categories based on shape.
• Implementation currently in progress in collaboration with ICCE.  IoT Integration on Shaker Machine • Developed a low-cost non-contact AC sensor to monitor the operational status of components in a shaker machine at the Product Reliability Lab, TSS CAR, TCE.
• Sensor data processed and deployed using Arduino IoT Cloud and Google Drive for long-term monitoring and storage.
IoT Integration on Shaker Machine • Developed a low-cost non-contact AC sensor to monitor the operational status of components in a shaker machine at the Product Reliability Lab, TSS CAR, TCE.
• Sensor data processed and deployed using Arduino IoT Cloud and Google Drive for long-term monitoring and storage. 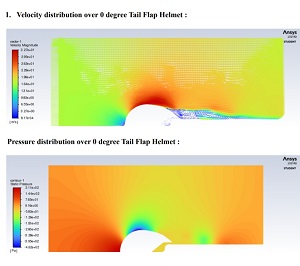 Aerodynamic Drag Study of Time-Trial Cycling Helmets • Conducted computational flow analysis of cycling helmets with tail flap angles of 0°, 3°, and 9° using ANSYS Fluent.
• Analysis showed that tail flap angles of 6°–9° significantly reduce drag coefficient compared to baseline configurations.
Aerodynamic Drag Study of Time-Trial Cycling Helmets • Conducted computational flow analysis of cycling helmets with tail flap angles of 0°, 3°, and 9° using ANSYS Fluent.
• Analysis showed that tail flap angles of 6°–9° significantly reduce drag coefficient compared to baseline configurations.  Design Analysis of Detroit 8V-71 Marine Diesel Engine Piston • Redesigned the Detroit 8V-71 marine diesel engine piston using convex and concave head profiles.
• Performed static stress analysis in ANSYS Workbench to compare flat, dome, and concave head designs.
• Results showed that the concave head profile exhibited lower stresses and total deformation.
Design Analysis of Detroit 8V-71 Marine Diesel Engine Piston • Redesigned the Detroit 8V-71 marine diesel engine piston using convex and concave head profiles.
• Performed static stress analysis in ANSYS Workbench to compare flat, dome, and concave head designs.
• Results showed that the concave head profile exhibited lower stresses and total deformation.